SCARA-ს რობოტული მკლავები – Z-Arm-4160B კოლაბორაციული რობოტული მკლავი





მთავარი კატეგორია
სამრეწველო რობოტის მკლავი / კოლაბორაციული რობოტის მკლავი / ელექტრო დამჭერი / ინტელექტუალური აქტივატორი / ავტომატიზაციის გადაწყვეტილებები
აპლიკაცია
SCIC Z-Arm კობოტები არის მსუბუქი, 4-ღერძიანი კოლაბორაციული რობოტები ჩაშენებული წამყვანი ძრავით და აღარ საჭიროებენ რედუქტორებს, როგორც სხვა ტრადიციული SCAR-ები, რაც 40%-ით ამცირებს ღირებულებას. SCIC Z-Arm კობოტებს შეუძლიათ განახორციელონ ფუნქციები, მათ შორის, მაგრამ არა მხოლოდ, 3D ბეჭდვა, მასალების დამუშავება, შედუღება და ლაზერული გრავირება. მას შეუძლია მნიშვნელოვნად გააუმჯობესოს თქვენი სამუშაოსა და წარმოების ეფექტურობა და მოქნილობა.
მახასიათებლები

მაღალი სიზუსტე
განმეორებადობა
±0.02 მმ
მორგებული Z-ღერძი
0.1-0.8 მ
დიდი ტვირთამწეობა
4 კგ სადგამი
მაქს. 5 კგ
უფრო მაღალი სიჩქარე
მაქსიმალური ხაზოვანი სიჩქარე 2 მ/წმ
(დატვირთვის 5 კგ)
დიდი მკლავის სიგრძე, მაღალი სიზუსტის 4-ღერძიანი რობოტის მკლავი მარტივი გამოსაყენებლად
მაღალი სიზუსტე
განმეორებადობა: ±0.02 მმ
დიდი მკლავის სიგრძე
J1-ღერძი: 325 მმ,J2-ღერძი: 275 მმ
მორგებული Z-ღერძი
ზევით-ქვევით მიმართულების მორგება შესაძლებელია 0.1მ-დან 0.8მ-მდე
სივრცის დამზოგავი
დისკი/კონტროლერი ჩაშენებულია
მარტივი და მარტივი გამოსაყენებელი
ახალბედა ადამიანისთვის, ვინც რობოტის მკლავი არ იცის, მისი გამოყენება მარტივია, ინტერფეისი იხსნება.
მაღალი სიჩქარე
მისი სიჩქარეა 2000 მმ/წმ 4 კგ დატვირთვის ქვეშ.

მსგავსი პროდუქტები



სპეციფიკაციის პარამეტრი
SCIC Hitbot Z-Arm 4160B შექმნილია SCIC Tech-ის მიერ, ეს არის მსუბუქი კოლაბორაციული რობოტი, მარტივი პროგრამირებადი და გამოსაყენებელი, SDK-ის მხარდაჭერით. გარდა ამისა, მას აქვს შეჯახების დეტექციის მხარდაჭერა, კერძოდ, ის ავტომატურად ჩერდება ადამიანს შეხებისას, რაც ჭკვიანი ადამიან-მანქანის თანამშრომლობის შედეგია და უსაფრთხოება მაღალია.
| Z-Arm 4160B კოლაბორაციული რობოტის მკლავი | პარამეტრები |
| 1 ღერძიანი მკლავის სიგრძე | 325 მმ |
| 1 ღერძის ბრუნვის კუთხე | ±90° |
| 2 ღერძიანი მკლავის სიგრძე | 275 მმ |
| 2 ღერძიანი ბრუნვის კუთხე | ±164° (არასავალდებულო): 15-345 გრადუსი |
| Z ღერძის დარტყმა | 410 სიმაღლის მორგება შესაძლებელია |
| R ღერძის ბრუნვის დიაპაზონი | ±1080° |
| ხაზოვანი სიჩქარე | 2000 მმ/წმ (დატვირთვა 4 კგ) |
| განმეორებადობა | ±0.02 მმ |
| სტანდარტული დატვირთვა | 4 კგ |
| მაქსიმალური დატვირთვა | 5 კგ |
| თავისუფლების ხარისხი | 4 |
| ელექტრომომარაგება | 220V/110V50-60HZ ადაპტირება 48VDC პიკური სიმძლავრის 960W-მდე |
| კომუნიკაცია | Ethernet |
| გაფართოებადობა | ჩაშენებული მოძრაობის კონტროლერი უზრუნველყოფს 24 შეყვანა/გამოსვლას + იღლიის გაფართოებას |
| Z-ღერძის სიმაღლეში მორგება შესაძლებელია | 0.1მ~0.8მ |
| Z-ღერძის გადათრევის სწავლება | / |
| ელექტრო ინტერფეისი დაცულია | სტანდარტული კონფიგურაცია: 24*23awg (დაუცველი) მავთულები სოკეტის პანელიდან ქვედა მკლავის საფარის გავლით სურვილისამებრ: 2 φ4 ვაკუუმური მილი ბუდის პანელისა და ფლანგის გავლით |
| თავსებადი HITBOT ელექტრო დამჭერები | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| სუნთქვის შუქი | / |
| მეორე ხელის მოძრაობის დიაპაზონი | სტანდარტული: ±164° (არასავალდებულო): 15-345 გრადუსი |
| დამატებითი აქსესუარები | / |
| გარემოს გამოყენება | გარემოს ტემპერატურა: 0-45°C ტენიანობა: 20-80%RH (ყინვის გარეშე) |
| ციფრული შემავალი/გამომავალი პორტი (იზოლირებული) | 9+3+ წინამხრის გაშლა (სურვილისამებრ) |
| შემავალი/გამომავალი პორტი ციფრული გამომავალი (იზოლირებული) | 9+3+ წინამხრის გაშლა (სურვილისამებრ) |
| შემავალი/გამომავალი პორტი ანალოგური შეყვანა (4-20mA) | / |
| შემავალი/გამომავალი პორტი ანალოგური გამომავალი (4-20mA) | / |
| რობოტის მკლავის სიმაღლე | 860 მმ |
| რობოტის ხელის წონა | 410 მმ დარტყმის წმინდა წონა 36.5 კგ |
| ბაზის ზომა | 250 მმ*250 მმ*15 მმ |
| მანძილი ბაზის დამაგრების ხვრელებს შორის | 200 მმ*200 მმ ოთხი M8*20 ხრახნით |
| შეჯახების აღმოჩენა | √ |
| დრაგ სწავლება | √ |
იდეალური არჩევანი მსუბუქი აწყობის ამოცანებისთვის
Z-Arm XX60B არის 4-ღერძიანი რობოტის მკლავი დიდი მკლავების შლილით, რომელიც იკავებს მცირე ფართობს, ძალიან შესაფერისია სამუშაო სადგურზე ან მანქანაში დასამონტაჟებლად და იდეალური არჩევანია მსუბუქი აწყობის სამუშაოებისთვის.


მსუბუქი დიდი ბრუნვის კუთხით

პროდუქტის წონა დაახლოებით 36.5 კგ-ია, მისი მაქსიმალური დატვირთვა შეიძლება იყოს 5 კგ-მდე, 1 ღერძის ბრუნვის კუთხეა ±90°, 2 ღერძის ბრუნვის კუთხეა ±164°, ხოლო R ღერძის ბრუნვის დიაპაზონი შეიძლება იყოს ±1080°-მდე.
დიდი მკლავის შკალით, ფართო გამოყენება

Z-Arm XX60B-ს აქვს გრძელი მკლავის სიგრძე, 1-ღერძიანის სიგრძეა 325 მმ, 2-ღერძიანის სიგრძე 275 მმ, მისი წრფივი სიჩქარე შეიძლება იყოს 2000 მმ/წმ-მდე 4 კგ დატვირთვის ქვეშ.


მოქნილი განლაგებისთვის, სწრაფი გადართვისთვის
Z-Arm XX60B-ს ახასიათებს მსუბუქი წონა, სივრცის დაზოგვა და განლაგების მოქნილობა, ის შესაფერისია მრავალ გამოყენებაში განსათავსებლად და არ შეცვლის წარმოების წინა განლაგებას, მათ შორის პროცესის თანმიმდევრობის სწრაფ შეცვლას და მცირე პარტიის წარმოების დასრულებას და ა.შ.
DragTeaching პროგრამის დასრულებამდე

პროგრამული უზრუნველყოფა დაფუძნებულია გრაფიკულ დიზაინზე, ის უზრუნველყოფს წერტილოვან, გამომავალ სიგნალს, ელექტრო დამჭერს, უჯრას, დაყოვნებულ, ქვეპროცესორს, გადატვირთვას და სხვა ძირითად ფუნქციურ მოდულებს, მომხმარებლებს შეუძლიათ მოდულის გადათრევა რობოტის მკლავის პროგრამირების არეალში სამართავად, ინტერფეისი მარტივია, მაგრამ ფუნქცია ძლიერია.
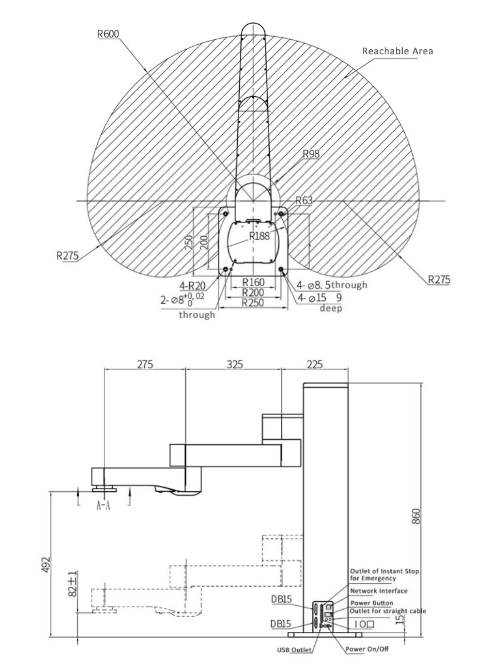
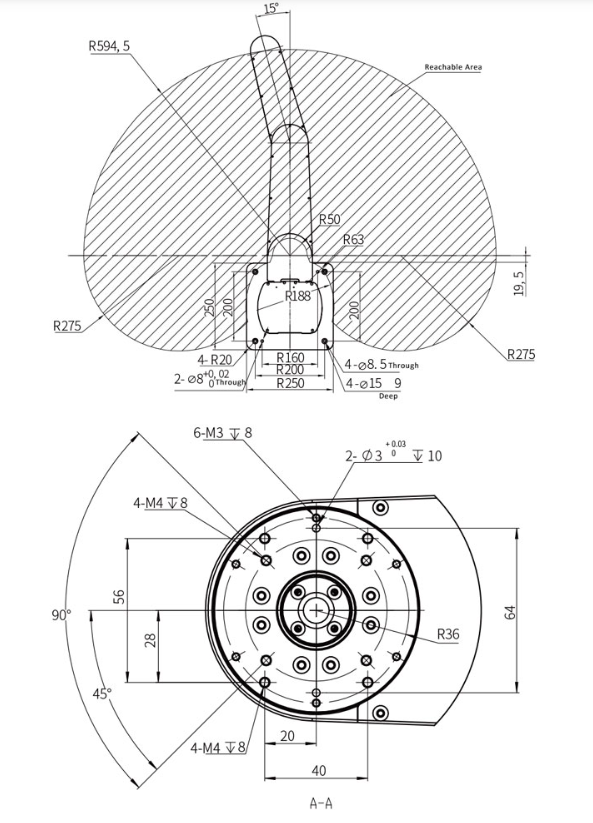
მოძრაობის დიაპაზონი M1 ვერსია (გარე მიმართულებით შემობრუნება)
DB15 კონექტორის რეკომენდაცია

რეკომენდებული მოდელი: მოოქროვილი მამრობითი სქესის კონუსი ABS კორპუსით YL-SCD-15M მოოქროვილი დედალი კონუსი ABS კორპუსით YL-SCD-15F
ზომის აღწერა: 55 მმ*43 მმ*16 მმ
(იხილეთ სურათი 5)
რობოტის მკლავის გარე გამოყენების გარემოს დიაგრამა

ჩვენი ბიზნესი






