6 კგ-იანი დატვირთვის კოლაბორაციული რობოტული მკლავები





6 კგ-იანი დატვირთვის კოლაბორაციული რობოტული მკლავები
მთავარი კატეგორია
სამრეწველო რობოტის მკლავი / კოლაბორაციული რობოტის მკლავი / ელექტრო დამჭერი / ინტელექტუალური აქტივატორი / ავტომატიზაციის გადაწყვეტილებები
აპლიკაცია
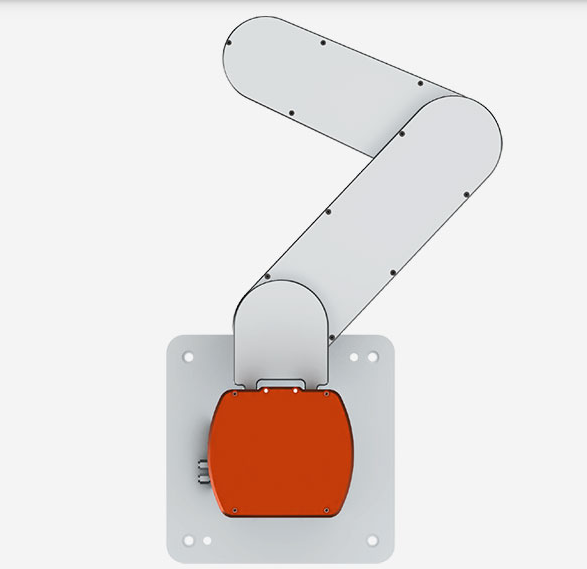
SCIC Z-Arm კობოტები არის მსუბუქი, 4-ღერძიანი კოლაბორაციული რობოტები ჩაშენებული წამყვანი ძრავით და აღარ საჭიროებენ რედუქტორებს, როგორც სხვა ტრადიციული SCAR-ები, რაც 40%-ით ამცირებს ღირებულებას. SCIC Z-Arm კობოტებს შეუძლიათ განახორციელონ ფუნქციები, მათ შორის, მაგრამ არა მხოლოდ, 3D ბეჭდვა, მასალების დამუშავება, შედუღება და ლაზერული გრავირება. მას შეუძლია მნიშვნელოვნად გააუმჯობესოს თქვენი სამუშაოსა და წარმოების ეფექტურობა და მოქნილობა.
მახასიათებლები

მაღალი სიზუსტე
განმეორებადობა
±0.05 მმ
დიდი ტვირთამწეობა
4 კგ სადგამი
მაქს. 5 კგ
უფრო მაღალი სიჩქარე
მაქსიმალური ხაზოვანი სიჩქარე 1.4 მ/წმ
(სადგამზე დატვირთვა 4 კგ)
კონკურენტუნარიანი ფასი
ინდუსტრიული დონის ხარისხი
Cკონკურენტუნარიანი ფასი
მარტივი პროგრამირება, სწრაფი ინსტალაცია, მოქნილი 4-ღერძიანი რობოტის მკლავი
მაღალი დატვირთვა
სტანდარტული დატვირთვა: 4 კგმაქსიმალური დატვირთვა: 5 კგ
მაღალი სიზუსტე
განმეორებადობა: ±0.05 მმ
მორგებული Z-ღერძი
ზევით და ქვევით დახრის რეგულირება შესაძლებელია 10 მმ-დან 1000 მმ-მდე დიაპაზონში.
მაღალი სიჩქარე
მისი ხაზოვანი სიჩქარე 4 კგ დატვირთვისას 1400 მმ/წმ-მდეა.
მარტივი გამოსაყენებელი
ასევე მარტივი გამოსაყენებელია მათთვისაც კი, ვინც რობოტის შესახებ არაფერი იცოდა
ინტეგრირებული წამყვანი და კონტროლერი
დამატებითი წრედის გარეშე, მარტივი ინსტალაცია და აწყობა

მსგავსი პროდუქტები



სპეციფიკაციის პარამეტრი
SCIC Z-Arm 4150 შექმნილია SCIC Tech-ის მიერ, ეს არის მსუბუქი კოლაბორაციული რობოტი, მარტივი პროგრამირებადი და გამოსაყენებელი, SDK-ის მხარდაჭერით. გარდა ამისა, მას აქვს შეჯახების დეტექციის მხარდაჭერა, კერძოდ, ის ავტომატურად ჩერდება ადამიანს შეხებისას, რაც ჭკვიანი ადამიან-მანქანის თანამშრომლობის შედეგია და უსაფრთხოება მაღალია.
| Z-Arm 4150 კოლაბორაციული რობოტის მკლავი | პარამეტრები |
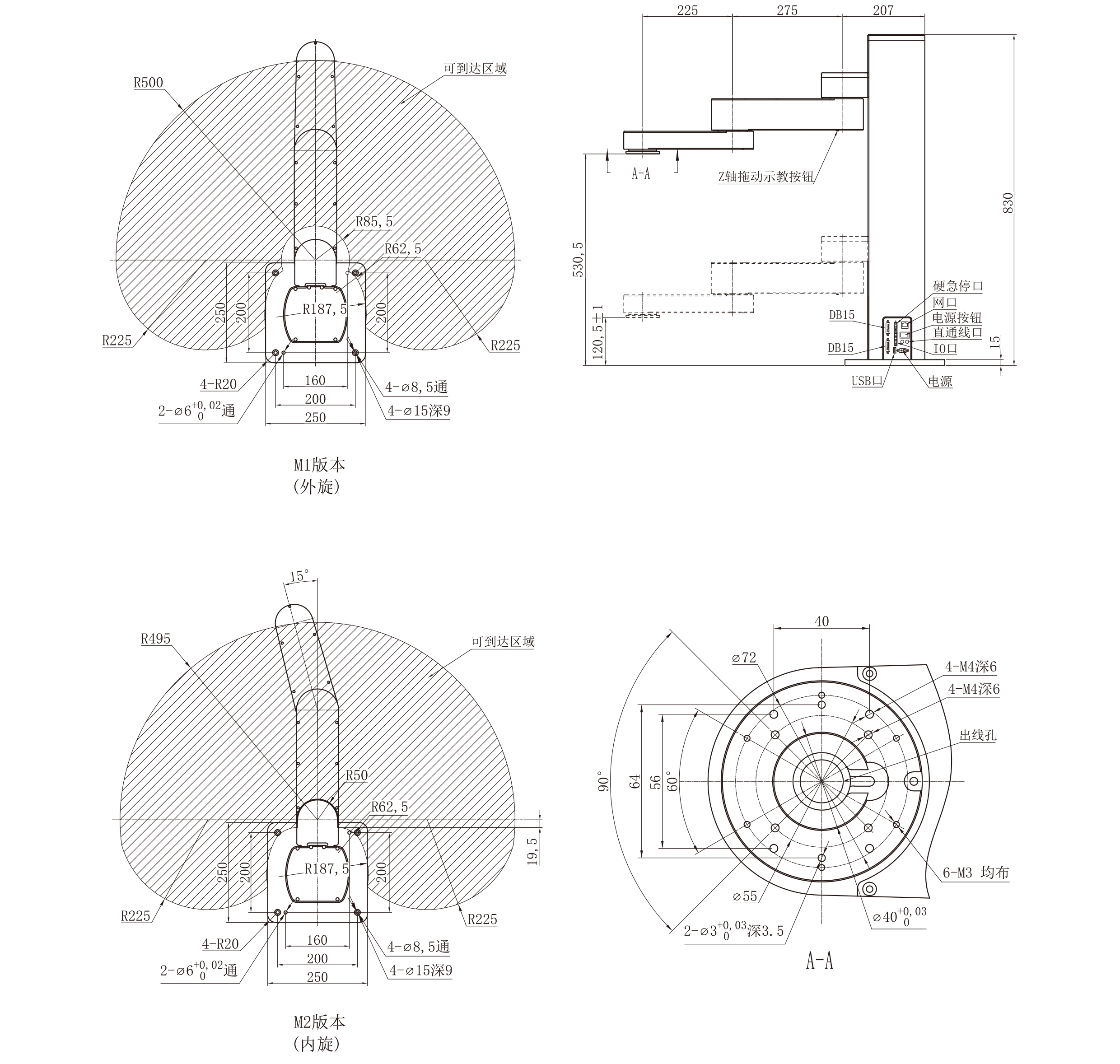
| 1 ღერძიანი მკლავის სიგრძე | 275 მმ |
| 1 ღერძიანი ბრუნვის კუთხე | ±90° |
| 2 ღერძიანი მკლავის სიგრძე | 225 მმ |
| 2 ღერძიანი ბრუნვის კუთხე | ±164° (არასავალდებულო): 15-345 გრადუსი |
| Z ღერძის დარტყმა | 410 სიმაღლის მორგება შესაძლებელია |
| R ღერძის ბრუნვის დიაპაზონი | ±1080° |
| ხაზოვანი სიჩქარე | 1400 მმ/წმ (დატვირთვა 4 კგ) |
| განმეორებადობა | ±0.05 მმ |
| სტანდარტული დატვირთვა | 4 კგ |
| მაქსიმალური დატვირთვა | 5 კგ |
| თავისუფლების ხარისხი | 4 |
| ელექტრომომარაგება | 220V/110V50-60HZ ადაპტირება 48VDC პიკური სიმძლავრის 960W-მდე |
| კომუნიკაცია | Ethernet |
| გაფართოებადობა | ჩაშენებული მოძრაობის კონტროლერი უზრუნველყოფს 24 შეყვანა/გამოსვლას + იღლიის გაფართოებას |
| Z-ღერძის სიმაღლეზე მორგება შესაძლებელია | 0.1მ~1მ |
| Z-ღერძის გადათრევის სწავლება | / |
| ელექტრო ინტერფეისი დაცულია | სტანდარტული კონფიგურაცია: 24*23awg (დაუცველი) მავთულები სოკეტის პანელიდან ქვედა მკლავის საფარის გავლით სურვილისამებრ: 2 φ4 ვაკუუმური მილი ბუდის პანელისა და ფლანგის გავლით |
| თავსებადი HITBOT ელექტრო დამჭერები | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100/5thAxis, 3D ბეჭდვა |
| სუნთქვის შუქი | / |
| მეორე ხელის მოძრაობის დიაპაზონი | სტანდარტული: ±164° (არასავალდებულო): 15-345 გრადუსი |
| დამატებითი აქსესუარები | / |
| გარემოს გამოყენება | გარემოს ტემპერატურა: 0-45°C ტენიანობა: 20-80%RH (ყინვის გარეშე) |
| ციფრული შემავალი/გამომავალი პორტი (იზოლირებული) | 9+3+ წინამხრის გაშლა (სურვილისამებრ) |
| შემავალი/გამომავალი პორტი ციფრული გამომავალი (იზოლირებული) | 9+3+ წინამხრის გაშლა (სურვილისამებრ) |
| შემავალი/გამომავალი პორტი ანალოგური შეყვანა (4-20mA) | / |
| შემავალი/გამომავალი პორტი ანალოგური გამომავალი (4-20mA) | / |
| რობოტის მკლავის სიმაღლე | 830 მმ |
| რობოტის ხელის წონა | 410 მმ დარტყმის წმინდა წონა 28 კგ |
| ბაზის ზომა | 250 მმ*250 მმ*15 მმ |
| მანძილი ბაზის დამაგრების ხვრელებს შორის | 200 მმ*200 მმ ოთხი M8*20 ხრახნით |
| შეჯახების აღმოჩენა | √ |
| დრაგ სწავლება | √ |
მაქსიმალური დატვირთვა: 5 კგ, იდეალური არჩევანი აწყობის სამუშაოსთვის
Z-Arm XX50 არის მოქნილი 4-ღერძიანი რობოტის მკლავი, მისი მაქსიმალური დატვირთვა შეიძლება იყოს 5 კგ-მდე, იკავებს მცირე ფართობს, ძალიან შესაფერისია სამუშაო სადგურზე ან მანქანა-დანადგარებში განსათავსებლად და იდეალური არჩევანია ავტომატური აწყობის წარმოების ხაზებისთვის.

მსუბუქი, დიდი ბრუნვის კუთხე

მისი პროდუქტის წონა დაახლოებით 28 კგ-ია, მკლავების სიგრძე 275 მმ-მდეა, 1 ღერძის ბრუნვის კუთხეა ±90°, 2 ღერძის ბრუნვის კუთხეა ±164°, R ღერძის ბრუნვის დიაპაზონი შეიძლება მიაღწიოს ±1080°-ს.
მისი სიმაღლის მარტივად რეგულირება შესაძლებელია
ინტეგრირებული მართვა და კონტროლერი, დამატებითი წრედის გარეშე, მარტივი ინსტალაცია და ინტეგრაცია, Z-ღერძის სიმაღლის მორგება შესაძლებელია 10 მმ-დან 1000 მმ-მდე, მას შეუძლია შიდა ბრუნვის განხორციელება დაბრკოლების თავიდან ასაცილებლად.

მოქნილი განლაგებისთვის, სწრაფი გადართვისთვის
Z-Arm XX50 არის მაღალი ინტეგრაციის რობოტი მკლავი, რომელსაც ახასიათებს სივრცის დაზოგვისა და განლაგების მოქნილობის მახასიათებლები, შესაფერისია მრავალ გამოყენებაში განსათავსებლად, არ საჭიროებს წარმოების რეგულარული განლაგების შეცვლას, მათ შორის მცირე პარტიების წარმოების სწრაფ გადართვას და დასრულებას და ა.შ.
შესანიშნავი თანამშრომლობა და უსაფრთხოება
რობოტის მკლავს შეუძლია ადამიანთან თანამშრომლობა დამატებითი დაცვის გარეშე, რათა ჩაანაცვლოს ჭუჭყიანი, საშიში და მოსაწყენი ამოცანები, რათა თავიდან აიცილოს და შემცირდეს განმეორებითი დაძაბულობით გამოწვეული დაზიანებები და შემთხვევითი დაზიანებები.

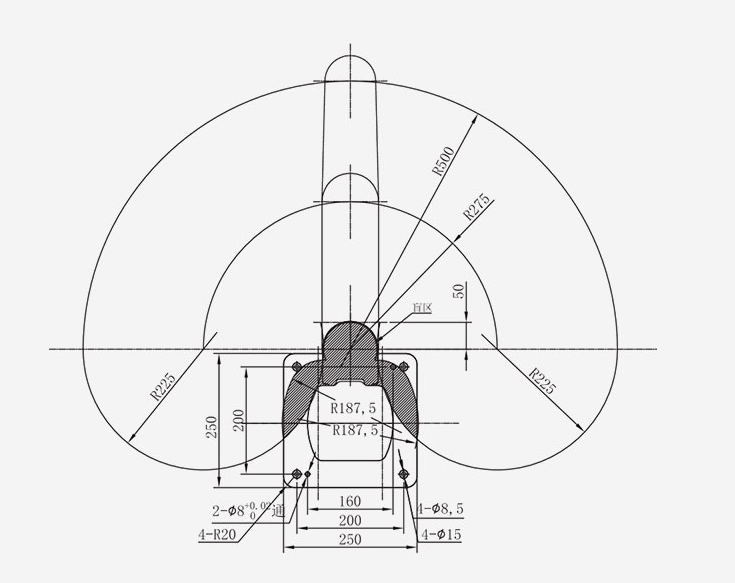
მოძრაობის დიაპაზონი M1 ვერსია (გარე მიმართულებით შემობრუნება)
DB15 კონექტორის რეკომენდაცია

რეკომენდებული მოდელი: მოოქროვილი მამრობითი სქესის კონუსი ABS კორპუსით YL-SCD-15M მოოქროვილი დედალი კონუსი ABS კორპუსით YL-SCD-15F
ზომის აღწერა: 55 მმ*43 მმ*16 მმ
(იხილეთ სურათი 5)
რობოტის მკლავის გარე გამოყენების გარემოს დიაგრამა

ჩვენი ბიზნესი


პროდუქტების კატეგორიები
-

დაბალი ფასის მრავალჯერადი გამოყენების უსაფრთხოების ISO სერტიფიკატი Cobot...
-

Szgh 6 ღერძიანი სამრეწველო რობოტის მკლავის კოლაჟი...
-

ჩინეთის საბითუმო მოვაჭრე მაღალი ეფექტურობის 4 ღერძიანი პალეტიზაციის...
-
მაღალი ხარისხის 5 ღერძიანი ტელესკოპური რობოტის მკლავი...
-

4086 მაღალი ღირებულების მინი რობოტის მკლავის ინდუსტრია...
-
სამრეწველო მანქანა-რობოტის მკლავი 4 ღერძიანი მანიპულატორი...