HITBOT-ის ელექტრო დამჭერის სერია – Z-EFG-26 პარალელური ელექტრო დამჭერი



მთავარი კატეგორია
სამრეწველო რობოტის მკლავი / კოლაბორაციული რობოტის მკლავი / ელექტრო დამჭერი / ინტელექტუალური აქტივატორი / ავტომატიზაციის გადაწყვეტილებები
აპლიკაცია
SCIC Z-EFG სერიის რობოტ-მომჭერი მოწყობილობები მცირე ზომისაა ჩაშენებული სერვო სისტემით, რაც სიჩქარის, პოზიციისა და დამჭერი ძალის ზუსტ კონტროლს შესაძლებელს ხდის. ავტომატიზაციის გადაწყვეტილებებისთვის SCIC-ის უახლესი მომჭერი სისტემა საშუალებას მოგცემთ გახსნათ ახალი შესაძლებლობები ამოცანების ავტომატიზაციისთვის, რომელთა განხორციელებაც არასდროს გიფიქრიათ.

ფუნქცია
· დამჭერის ვარდნის აღმოჩენა, ფართობის გამოტანის ფუნქცია
· ძალის, პოზიციისა და სიჩქარის ზუსტად კონტროლი შესაძლებელია Modbus-ის საშუალებით
· ხანგრძლივი მუშაობის ვადა: ათობით მილიონი ციკლი, აღემატება ჰაერის კლანჭებს
· ჩაშენებული კონტროლერი: მცირე ფართობი, მარტივი ინტეგრაცია
· მართვის რეჟიმი: 485 (Modbus RTU), შეყვანა/გამოსვლა
დაჭერის ძალა, სიჩქარე შეიძლება იყოს სიზუსტე, რომელიც კონტროლდება Modbus-ის მიერ
მრავალჯერადი განაცხადი
მას აქვს დაჭერის ვარდნის დეტექტორი და რაიონული გამომავალი
ზუსტი კონტროლი
დამჭერი ძალის, ბიტის და სიჩქარის კონტროლი შესაძლებელია Modbus-ის მიერ
ხანგრძლივი სიცოცხლის ხანგრძლივობა
ათი მილიონი ციკლი, ჰაერის გადამჭერი
ჩაშენებული კონტროლერი
მცირე სივრცის ოკუპაცია, მოსახერხებელი ინტეგრაცია.
სწრაფი რეაგირება
ერთი დარტყმის უმოკლესი დრო მხოლოდ 0.25 წმ-ია
რბილი დამაგრება
მას შეუძლია დააჭიროს მყიფე ობიექტებს, როგორიცაა კვერცხი, შუშის ჭიქა და ა.შ.




სპეციფიკაციის პარამეტრი
Z-EFG-26 არის ელექტრო, 2-თითიანი პარალელური დამჭერი, პატარა ზომის, მაგრამ ძლიერი მრავალი რბილი ობიექტის დასაჭერად, როგორიცაა კვერცხი, მილები, ელექტრონული კომპონენტები და ა.შ.
● Z-EFG-26 ელექტრო დამჭერს აქვს ჩაშენებული კონტროლერი.
●მისი დარტყმის სიჩქარე და მოჭიდების ძალა რეგულირებადია.
●ტერმინალების შეცვლა შესაძლებელია სხვადასხვა მოთხოვნებთან ადაპტაციისთვის.
●ადვილად აიღეთ მყიფე და დეფორმირებადი ობიექტები, როგორიცაა კვერცხები, საცდელი მილები, რგოლები და ა.შ.
●გამოდგება ჰაერის წყაროების გარეშე სცენებისთვის (მაგალითად, ლაბორატორიები და საავადმყოფოები).
| მოდელის ნომერი Z-EFG-26 | პარამეტრები |
| სულ ინსულტი | 26 მმ |
| მოჭიდების ძალა | 6~15N |
| განმეორებადობა | ±0.02 მმ |
| რეკომენდებული დაჭერის წონა | მაქს. 0.3 კგ |
| Გადაცემა რეჟიმი | გადაცემათა თარო + განივი ლილვაკის სახელმძღვანელო |
| მოძრავი კომპონენტების ცხიმის შევსება | ყოველ ექვს თვეში ერთხელ ან 1 მილიონი მოძრაობა / დრო |
| ცალმხრივი მოძრაობის დრო | 0.25 წმ |
| ოპერაციული ტემპერატურის დიაპაზონი | 5-55℃ |
| სამუშაო ტენიანობის დიაპაზონი | RH35-80(ყინვა არ არის) |
| მოძრაობის რეჟიმი | ორი თითი ჰორიზონტალურად მოძრაობს |
| ინსულტის კონტროლი | რეგულირებადი |
| დამჭერი ძალის რეგულირება | რეგულირებადი |
| წონა | 0.45 კგ |
| ზომები(L*W*H) | 55*26*97 მმ |
| კონტროლერის განთავსება | ჩაშენებული |
| სიმძლავრე | 10 ვატი |
| ძრავის ტიპი | DC უჯაგრისო |
| პიკური დენი | 1A |
| ნომინალური ძაბვა | 24 ვოლტი |
| ლოდინის დენი | 0.4A |
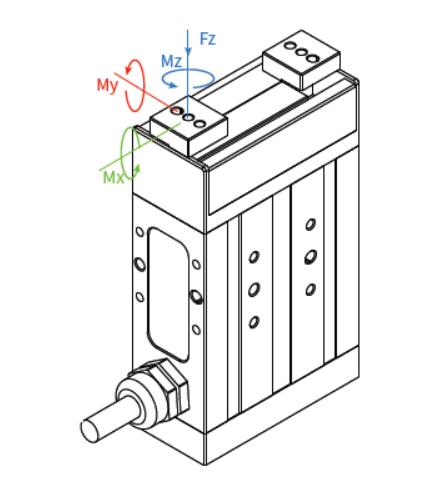
| დასაშვები სტატიკური დატვირთვა ვერტიკალური მიმართულებით | |
| Fz: | 250N |
| დასაშვები ბრუნვის მომენტი | |
| Mx: | 2.4 ნმ |
| ჩემი: | 2.6 ნმ |
| მზ: | 2 ნმ |
ზუსტი ძალის კონტროლი გამეორების სიზუსტე

ელექტრო დამჭერი აღჭურვილია სპეციალური ტრანსმისიის დიზაინითა და მართვის გაანგარიშებით კომპენსაციისთვის, მისი მთლიანი დარტყმის სიგრძეა 26 მმ, დამჭერი ძალაა 6-15N, დარტყმისა და დამჭერი ძალის რეგულირება შესაძლებელია, ხოლო მისი განმეორებადობაა ±0.02 მმ.
სწრაფი რეაქცია, უფრო სტაბილური

ერთჯერადი დარტყმის უმოკლესი დრო მხოლოდ 0.25 წმ-ია, რაც აკმაყოფილებს წარმოების ხაზის სწრაფ და სტაბილურ დამაგრების მოთხოვნებს.
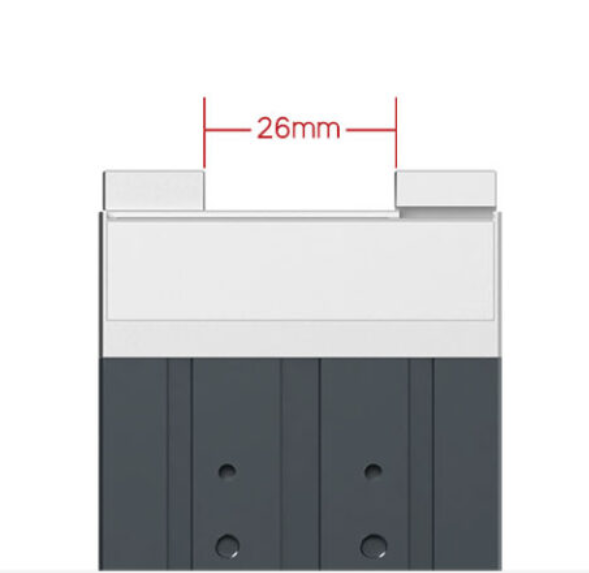
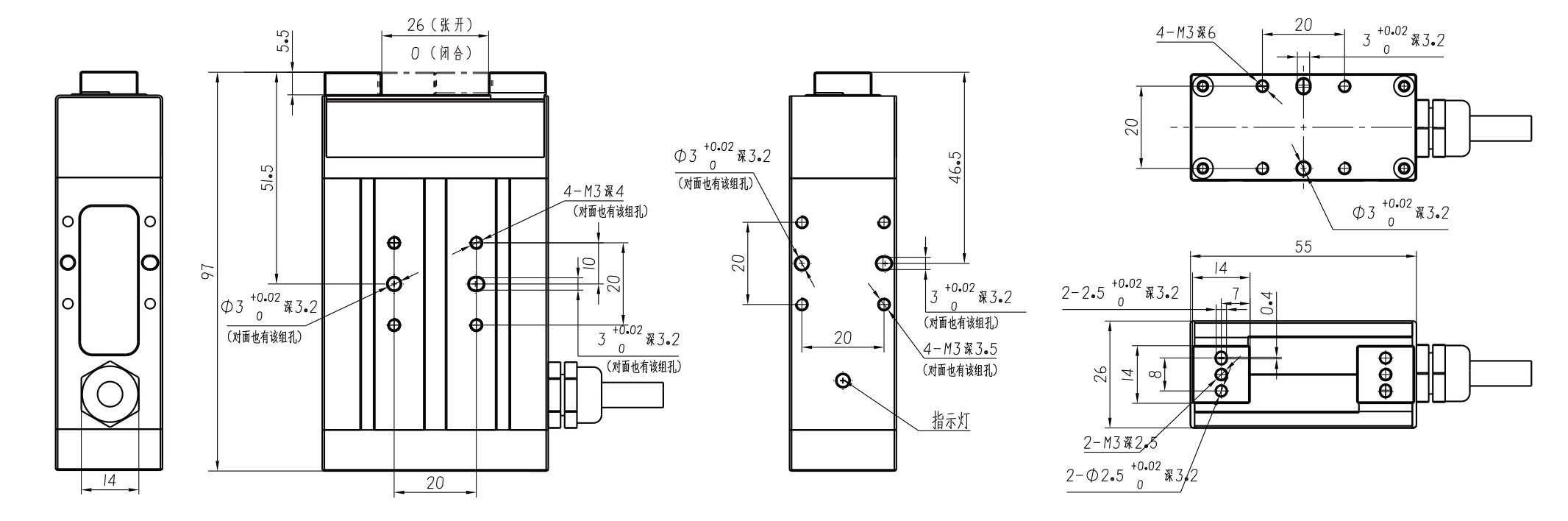
პატარა ფიგურა, მარტივი ინტეგრირებადი

Z-EFG-26-ის ზომებია სიგრძე 55*სიგანე 26*სიმაღლე 97 მმ, მისი კონსტრუქცია კომპაქტურია, მხარს უჭერს ხუთზე მეტ მოქნილ ინსტალაციის რეჟიმს, ჩაშენებულია კონტროლერი, იკავებს მცირე ადგილს და ადვილად უმკლავდება სხვადასხვა დამაგრების მოთხოვნებს.

ინტეგრირებული მართვისა და კონტროლერის რბილი დამჭერი

ელექტრო დამჭერის კუდის ნაწილის მარტივად შეცვლა შესაძლებელია, მისი დამჭერის წონა 300 გრამია, მომხმარებლებს შეუძლიათ სპეციალურად დააპროექტონ დამჭერის კუდის ნაწილი საკუთარი დამჭერი ობიექტების დასაკმაყოფილებლად, რათა ელექტრო დამჭერით მაქსიმალურად შეძლონ დამჭერი ამოცანების შესრულება.
გამრავლების კონტროლის რეჟიმები, მარტივი მართვა

Z-EFG-26 დამჭერის კონფიგურაცია მარტივია, მას აქვს უხვი მართვის რეჟიმი: 485 (Modbus RTU), პულსი, შეყვანა/გამოსვლა, ის თავსებადია PLC-ის მთავარ მართვის სისტემასთან.

განზომილების ინსტალაციის დიაგრამა
ჩვენი ბიზნესი







