რა განსხვავებაა ABB-ს, Fanuc-სა და Universal Robots-ს შორის?
1. FANUC რობოტი
რობოტების სალექციო დარბაზში შეიტყვეს, რომ სამრეწველო თანამშრომლობითი რობოტების შემოთავაზება, ყველაზე ადრე, 2015 წლით თარიღდება.
2015 წელს, როდესაც კოლაბორაციული რობოტების კონცეფცია ახალი გაჩენილი იყო, ოთხი რობოტების გიგანტიდან ერთ-ერთმა, Fanuc-მა, გამოუშვა ახალი კოლაბორაციული რობოტი CR-35iA, რომლის წონა 990 კგ იყო, ხოლო დატვირთვა 35 კგ, რაც იმ დროისთვის მსოფლიოში ყველაზე დიდი კოლაბორაციული რობოტი გახდა. CR-35iA-ს რადიუსი 1.813 მეტრამდეა, რაც ადამიანებთან ერთად იმავე სივრცეში მუშაობას უსაფრთხოების ღობის იზოლაციის გარეშე უწყობს ხელს, რაც არა მხოლოდ კოლაბორაციული რობოტების უსაფრთხოებისა და მოქნილობის მახასიათებლებით გამოირჩევა, არამედ დატვირთვის თვალსაზრისით უპირატესობას ანიჭებს დიდი დატვირთვის მქონე სამრეწველო რობოტებს, რაც კოლაბორაციულ რობოტებს აღემატება. მიუხედავად იმისა, რომ სხეულის ზომასა და საკუთარ წონას შორის ჯერ კიდევ დიდი სხვაობაა, მოხერხებულობასა და კოლაბორაციულ რობოტებს შორის ეს შეიძლება ჩაითვალოს Fanuc-ის ადრეულ კვლევად სამრეწველო კოლაბორაციულ რობოტებში.

წარმოების ინდუსტრიის ტრანსფორმაციასა და განახლებასთან ერთად, Fanuc-ის მიერ სამრეწველო კოლაბორაციული რობოტების შესწავლის მიმართულება თანდათან გაირკვა. კოლაბორაციული რობოტების დატვირთვის გაზრდასთან ერთად, Fanuc-მა ასევე შენიშნა კოლაბორაციული რობოტების სისუსტე მოსახერხებელი მუშაობის სიჩქარისა და მოსახერხებელი ზომის უპირატესობებში, ამიტომ 2019 წლის იაპონიის საერთაშორისო რობოტების გამოფენის ბოლოს, Fanuc-მა პირველად წარადგინა ახალი კოლაბორაციული რობოტი CRX-10iA მაღალი უსაფრთხოებით, მაღალი საიმედოობითა და მოსახერხებელი გამოყენებით, მისი მაქსიმალური დატვირთვაა 10 კგ-მდე, სამუშაო რადიუსი 1.249 მეტრი (მისი გრძელი მკლავიანი მოდელი CRX-10iA/L, მოქმედების რადიუსი 1.418 მეტრია), ხოლო მაქსიმალური გადაადგილების სიჩქარე წამში 1 მეტრს აღწევს.
ეს პროდუქტი შემდგომში გაფართოვდა და განახლდა და 2022 წელს Fanuc-ის CRX კოლაბორაციული რობოტების სერიად იქცა, მაქსიმალური დატვირთვით 5-25 კგ და რადიუსით 0.994-1.889 მეტრი, რომლის გამოყენება შესაძლებელია აწყობის, წებოს, შემოწმების, შედუღების, პალეტიზაციის, შეფუთვის, ჩარხების ჩატვირთვა-გადმოტვირთვისა და სხვა გამოყენების სცენარებში. ამ ეტაპზე ჩანს, რომ FANUC-ს აქვს მკაფიო მიმართულება კოლაბორაციული რობოტების დატვირთვისა და სამუშაო დიაპაზონის განახლების მიმართულებით, მაგრამ ჯერ არ უხსენებია სამრეწველო კოლაბორაციული რობოტების კონცეფცია.
2022 წლის ბოლომდე Fanuc-მა გამოუშვა CRX სერია, რომელსაც მას „ინდუსტრიული“ კოლაბორაციული რობოტი უწოდა და რომლის მიზანიც წარმოების ინდუსტრიის ტრანსფორმაციისა და განახლების ახალი შესაძლებლობების გამოყენება იყო. კოლაბორაციული რობოტების ორ პროდუქტის მახასიათებელზე - უსაფრთხოებასა და გამოყენების სიმარტივეზე ფოკუსირებით, Fanuc-მა გამოუშვა CRX „ინდუსტრიული“ კოლაბორაციული რობოტების სრული სერია, ოთხი მახასიათებლით: სტაბილურობა, სიზუსტე, სიმარტივე და მუშაობის სიჩქარე, პროდუქციის სტაბილურობისა და საიმედოობის გაუმჯობესებით. ეს რობოტები შეიძლება გამოყენებულ იქნას მცირე ნაწილების დამუშავების, აწყობისა და სხვა გამოყენების სცენარებში, რაც არა მხოლოდ დააკმაყოფილებს სამრეწველო მომხმარებლების საჭიროებებს კოლაბორაციულ რობოტებზე, რომლებსაც უფრო მაღალი მოთხოვნები აქვთ სივრცის, უსაფრთხოებისა და მოქნილობის მიმართ, არამედ სხვა მომხმარებლებს მაღალი საიმედოობის კოლაბორაციული რობოტის პროდუქტს სთავაზობს.
2. ABB რობოტი
მიმდინარე წლის თებერვალში, ABB-მ გრანდიოზულად გამოუშვა ახალი SWIFTI™ CRB 1300 სამრეწველო დონის კოლაბორაციული რობოტი, ABB-ის ქმედება, რომლის მიხედვითაც ბევრი ფიქრობს, რომ ეს პირდაპირ გავლენას მოახდენს კოლაბორაციული რობოტების ინდუსტრიაზე. სინამდვილეში, უკვე 2021 წლის დასაწყისში, ABB-ის კოლაბორაციული რობოტების პროდუქციის ხაზს დაემატა ახალი სამრეწველო კოლაბორაციული რობოტი და გამოუშვა SWIFTI™, რომლის სიჩქარე წამში 5 მეტრია, ტვირთამწეობა 4 კილოგრამია, სწრაფი და ზუსტია.
იმ დროს ABB მიიჩნევდა, რომ მისი სამრეწველო კოლაბორაციული რობოტების კონცეფცია აერთიანებდა სამრეწველო რობოტების უსაფრთხოების მაჩვენებლებს, გამოყენების სიმარტივეს, სიჩქარეს, სიზუსტესა და სტაბილურობას და მიზნად ისახავდა კოლაბორაციულ და სამრეწველო რობოტებს შორის არსებული უფსკრულის შევსებას.
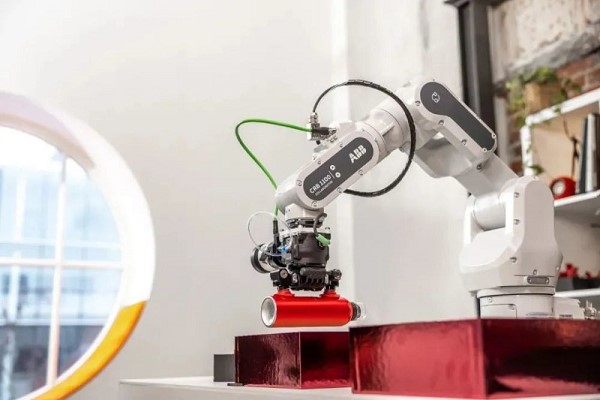
ეს ტექნიკური ლოგიკა განსაზღვრავს, რომ ABB-ის სამრეწველო კოლაბორაციული რობოტი CRB 1100 SWIFTI შემუშავებულია მისი ცნობილი სამრეწველო რობოტის, IRB 1100 სამრეწველო რობოტის, CRB 1100 SWIFTI-ის ბაზაზე, რომლის დატვირთვაა 4 კგ, მაქსიმალური სამუშაო დიაპაზონი 580 მმ-მდე, მარტივი და უსაფრთხო ექსპლუატაცია, ძირითადად წარმოების, ლოჯისტიკის და გამოყენების სხვა სფეროების სცენარების მხარდასაჭერად, წარმოების ეფექტურობის გასაუმჯობესებლად, ამავდროულად, მეტ საწარმოს ავტომატიზაციის მიღწევაში დასახმარებლად. ABB-ის კოლაბორაციული რობოტების გლობალური პროდუქტის მენეჯერმა, ჟანგ სიაოლუმ, განაცხადა: „SWIFTI-ს შეუძლია მიაღწიოს უფრო სწრაფ და უსაფრთხო თანამშრომლობას სიჩქარისა და მანძილის მონიტორინგის ფუნქციებით, რაც ამცირებს უფსკრულს კოლაბორაციულ და სამრეწველო რობოტებს შორის. მაგრამ როგორ შეიძლება ამის კომპენსირება და რომელ სცენარებში შეიძლება მათი გამოყენება, ABB იკვლევს“.
3. შენი რობოტი
2022 წლის შუა პერიოდში, კოლაბორაციული რობოტების შემქმნელმა, Universal Robots-მა, გამოუშვა პირველი სამრეწველო კოლაბორაციული რობოტის პროდუქტი UR20 შემდეგი თაობისთვის, ოფიციალურად შესთავაზა და ხელი შეუწყო სამრეწველო კოლაბორაციული რობოტების კონცეფციას, ხოლო Universal Robots-მა გაამხილა სამრეწველო კოლაბორაციული რობოტების სერიის ახალი თაობის გამოშვების იდეა, რამაც სწრაფად გამოიწვია ცხარე დისკუსიები ინდუსტრიაში.
რობოტების აუდიტორიის ცნობით, Universal Robots-ის მიერ გამოშვებული ახალი UR20-ის ძირითადი მახასიათებლები დაახლოებით სამ პუნქტად შეიძლება შევაჯამოთ: 20 კგ-მდე დატვირთვა, რაც Universal Robots-ის სფეროში ახალ მიღწევას წარმოადგენს, სახსრების ნაწილების რაოდენობის 50%-ით შემცირება, კოლაბორაციული რობოტების სირთულე, სახსრების სიჩქარისა და ბრუნვის მომენტის გაუმჯობესება და მუშაობის გაუმჯობესება. UR-ის სხვა კოლაბორაციულ რობოტულ პროდუქტებთან შედარებით, UR20-ს აქვს ახალი დიზაინი, რომელიც 20 კგ დატვირთვას, 64 კგ სხეულის წონას, 1750 მეტრის დიაპაზონს და ± 0.05 მმ განმეორებადობას აღწევს, რაც ინოვაციურ ინოვაციას მრავალ ასპექტში, როგორიცაა დატვირთვის ტევადობა და სამუშაო დიაპაზონი, აღწევს.

მას შემდეგ, Universal Robots-მა საფუძველი ჩაუყარა მცირე ზომის, დაბალი წონის, მაღალი დატვირთვის, დიდი სამუშაო დიაპაზონისა და მაღალი პოზიციონირების სიზუსტის მქონე სამრეწველო კოლაბორაციული რობოტების შემუშავებას.
გამოქვეყნების დრო: 2023 წლის 31 მაისი